Bucket Bot
I've started calling this robot by this name because I discovered that a white
plastic 5 gallon bucket fits nicely over the traction unit. My kids call it
B2D3 (thinking it is similar to R2D2 of StarWars fame).
Drive wheels and motors notes (I note that National
Power Chair sells rebuilt wheelchair drives at a variety of prices from
$136 to $200+, depending on the gearing and torque) (and so does C&H sales,
for the same price). The wheel chair motors are vastly over powered for this
application.
Traction Motor Control notes For now, the pair of
Novak ESC's in combination with a V-Tail mixer module (about $30) works to drive
the bucket around. The V-Tail mixer allows one stick on the R/C transmitter
to drive the two controllers in a sensible fashion (i.e. push stick straight
forward to go forward, etc.). Eventually, I can either stick the Vantec controllers
in, or I can stick with the Novak units and drive them from the SSC and a serial
port.
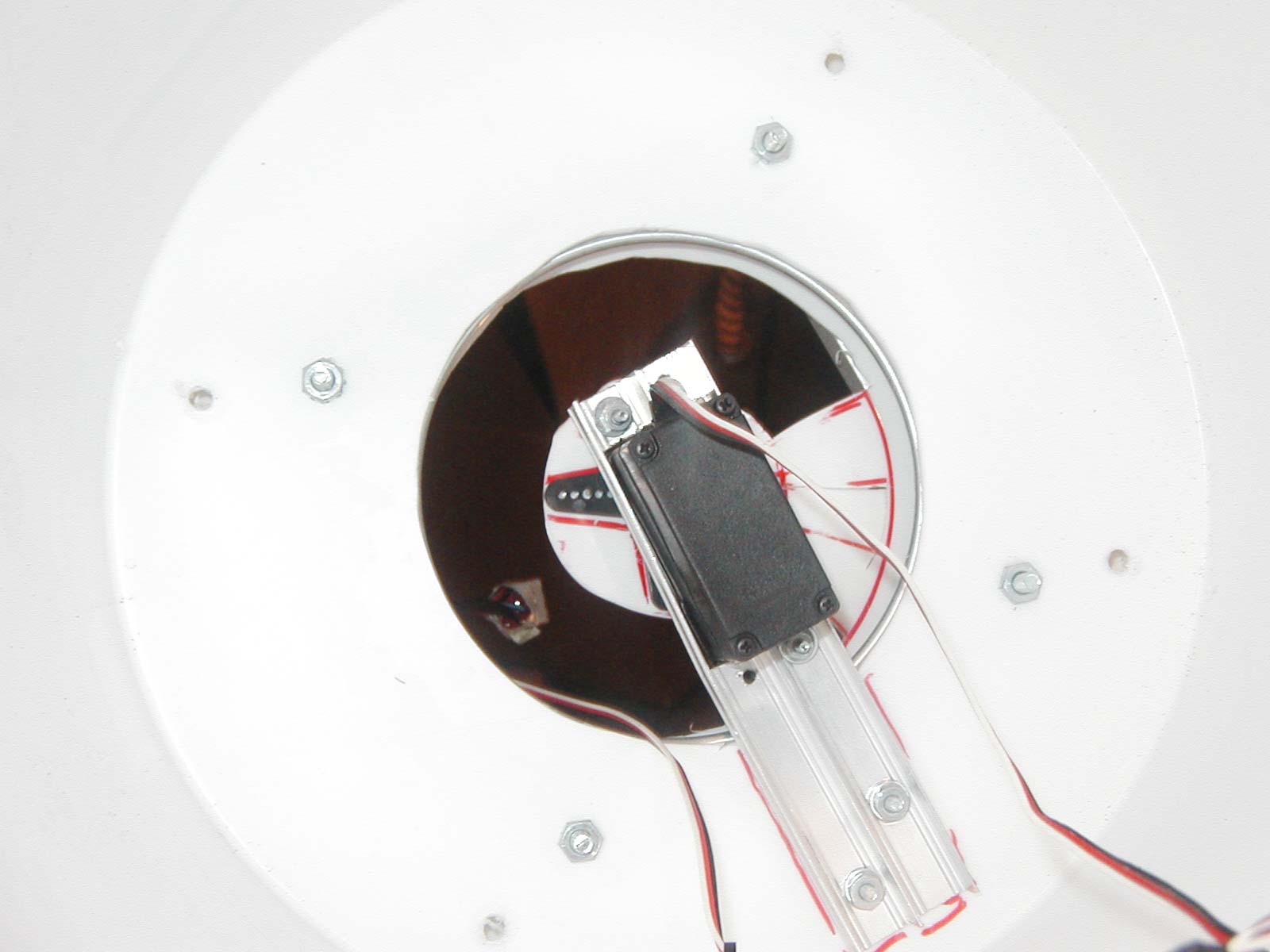
Stacking a second bucket on top of it makes for a nice package, especially
if the top bucket is on a bearing and can turn independently of the base. Some
preliminary work has been done on using the
top bucket as a form to hold a suitable omnidirectional antenna (although, see
below about the bucket whip). A 6" lazy susan bearing mounts nicely on
the base (i.e. the uppermost surface) of the lower bucket. The 4" hole
in the middle of the bearing gives plenty of room to feed wires, etc. up through
from the base. The lid for the second bucket is bolted to the bearing, providing
a handy mounting flange for the upper bucket. A "quarter scale" R/C
servo (Cirrus CS-400BB, since discontinued) scavenged from the snake robot serves
to move the upper bucket relative to the lower one, although, the 90 degree
motion range isn't as much as I'd like. This is more a problem with my R/C transmitter
than with the servo, which actually can swing 180 degrees.
Bump detectors. Standard NO push buttons mounted around the base, and then
covered by a "bumper" should serve nicely. The buttons can be "scanned"
by a 74LS138 or something from the Rabbit.
Power is provided by some "gel-cells" (probably actually starved
electrolyte or sealed lead acid). Here is a description of power
supply and control issues.
Video link
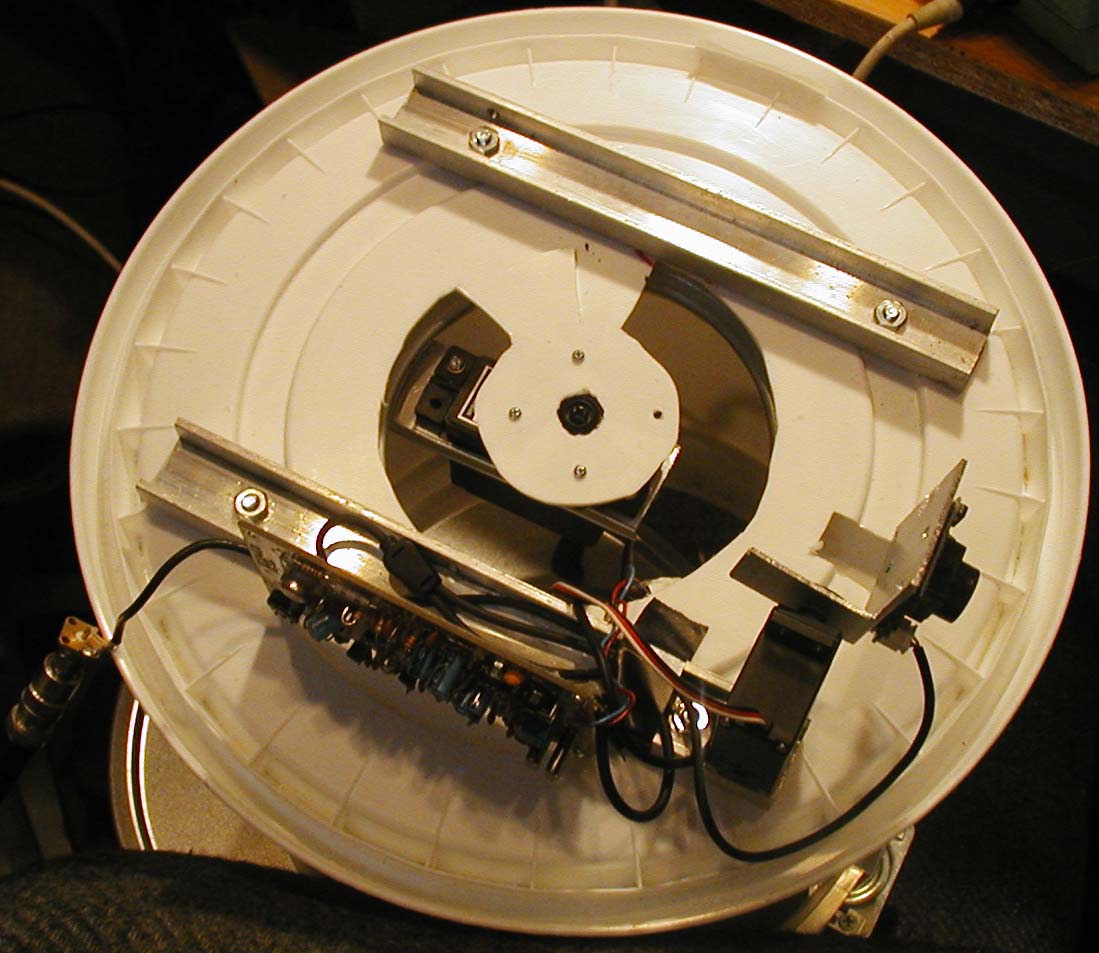
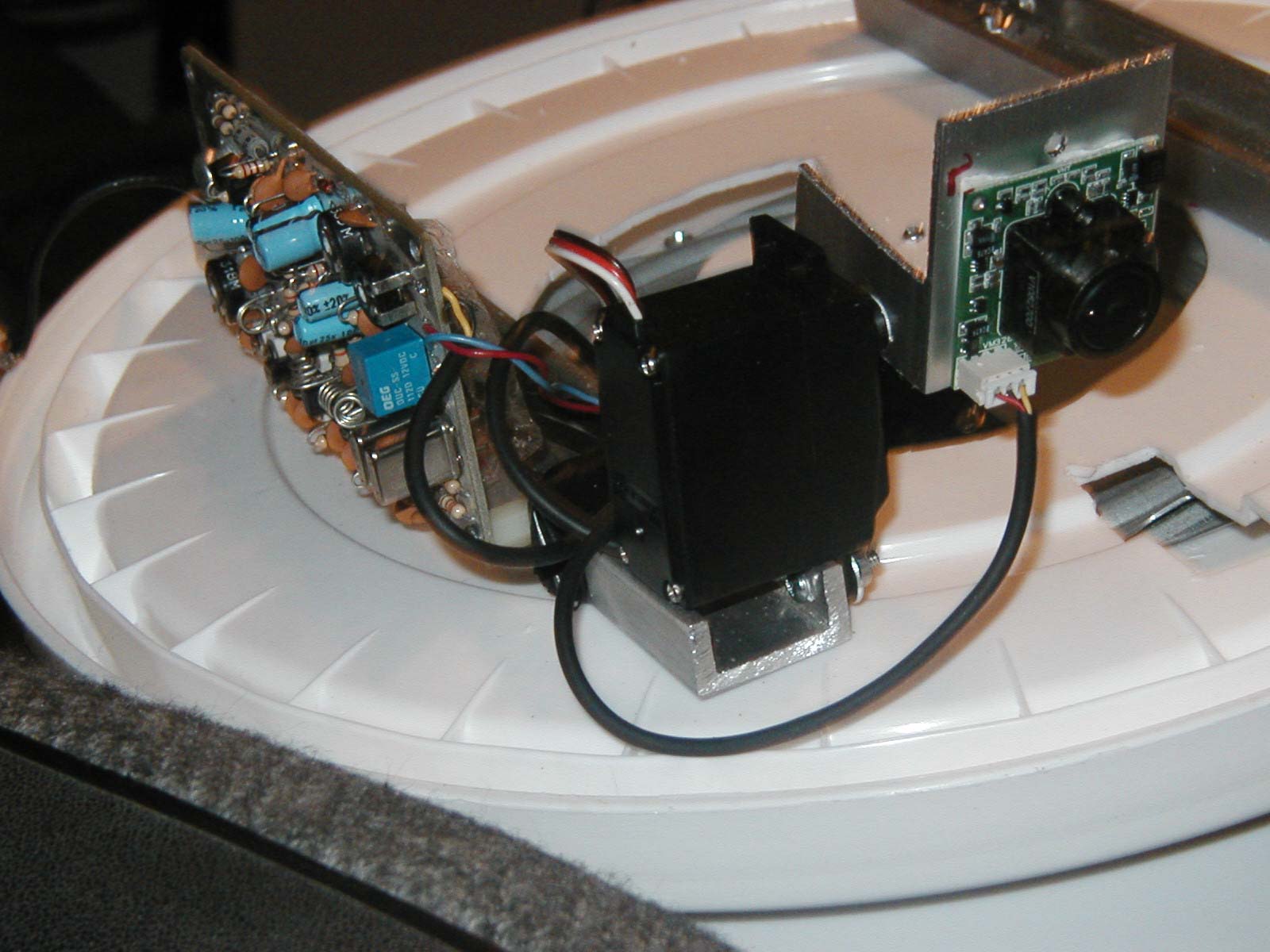
The bucket bot has a video link using a small camera mounted on a servo and
an amateur radio transmitter in the 70 cm (420-450MHz) band. The servo provides
90 degrees of elevation motion. The R/C transmitter is set up with one stick
controlling Az and El for the camera and the other stick controlling the locomotion.
I started with an old color camera I had which has very nice resolution and
dynamic range, but it didn't have any color signal when I tested it (B/W only)
and it gets pretty hot, so it's drawing a LOT of DC power. Therefore I switched
to a low power monochrome camera from All
Electronics (Cat # VC-360, $49) F2.0, 3.7mm lens 1/3" CCD (nominal
90 degree FOV). At first glance, it looks like monochrome may not be a very
good way to go, and I may want to go get a color camera. It's hard to navigate
by using the camera in monochrome (too many visual cues come from color)..
I've used the PC Electronics 70cm band transmitter (more at the ATV
page) feeding a quarter wave whip/groundplane which is built on the upper
bucket. The ground plane is 4 strips of 1" copper foil tape (13 cm from
center to edge) and the whip is a piece of bare #12 AWG wire (18 cm tall from
bucket surface to tip). It seems to work ok sitting on the bench, and preliminary
NEC models show that the pattern is fairly omnidirectional, with 7.2 dBi gain.
There are some pretty big nulls around 13-14 and 42 degrees above the horizontal,
because it is a vertical that is 1 wavelength off the ground. The match is pretty
uniform at 2:1 VSWR, which is not too hot, because the characteristic impedance
is around 26-27 ohms. Figuring out a way to "droop" the radials or
using a sleeve dipole might be a better approach. (Sleeve dipole impedance will
be around 70 ohms), or, implementing the bucket Lindenblad, which would help
kill the really big nulls from ground reflections.
The receiving end of the link is a PC Electronics TVC-2G which downconverts
the 426.25 to Channel 3. I have a small LCD TV velcro'ed on to the TVC-2G enclosure,
or I can feed a bigger TV. Oddly, the RCA (Radio Shack) LCD TV will tune to
the 426.25 on the UHF band. This is odd because since UHF TV starts around 470
MHz; perhaps it's an image.
For now, on the bench, I do the legally required ID by holding up a sign with
my call letters on it in front of the camera. On the robot, I'll put a sign
in the field of view when the camera is tilted full up or down. This is a heck
of a lot easier than adding a titler or keying the video on and off or adding
an audio subcarrier (although, the subcarrier might be kind of nifty... I could
put a mike on the robot).
Photos of BucketBot
robot/bucketbot.htm - 26 January 2002 - back to robots
- back to Jim's home page - Copyright 2001 Jim Lux
(mail)